
Cap Abreu, Cap Blanco, 1st Lt Ricardo Marques, 1st Lt Tagliari – 4th RCC
Summary
In view of the implementation of the Army’s Strategic Program – Armored Forces, which has as one of its objectives the modernization and acquisition of vehicles, it is increasingly important to improve the structures and processes of situational awareness of the FT U Bld Cmt.
Currently, it is notorious that there has been a great acceleration in the pace of combat and the need for this speed to also exist in the flow of information sent to Commanders at their various levels.
Because of this, we can list two aspects that would help in the situational awareness of a FT U Bld commander: the use of a GCB (Battle Field Management) and SARP (Remotely Manned Aircraft System). Keywords: Army Strategic Program Armored Forces; situational awareness; GCB; SARP.

Introduction
Current combat has forced armies to evolve their methods and technologies in combat, aiming at an achievement of tactical, operational, and strategic objectives.
It is true to say that situational awareness on the part of the commanders of troops in combat has become extremely important, as they increasingly need quick and accurate information from the battlefield for better decision making. Situational awareness is the perception of elements of the environment, the understanding of their meaning, and the projection of their state in the near future (ENDSLEY, 1995).
Currently, there is an acceleration in the pace of combat, and there is a need for this speed to also exist in the flow of information sent to commanders at their various levels. In order to have an adequate decision making process, situational awareness of the operational environment in which the troops are inserted becomes fundamental, depending more and more on an efficient Information and Communications Technology (ICT) system that provides commanders with succinct and precise command and control (C2).
The Combat Command and Control function is the set of activities by which the employment of forces and assets in military operations is planned, directed, coordinated, and controlled. It constitutes the link between the superior and subordinate echelons (BRASIL, 2015).
This function provides commanders, at strategic and tactical levels, with timely information for decision making during all phases of combat. The commander who has the best capacity for observation and guidance will be able to decide more precisely and quickly and act first, forcing the enemy to restart his cycle due to the changes generated on the battlefield by his opponent’s actions, thus causing strategic paralysis.
The FT U Bld Cmt, in order to be able to employ his fractions well and obtain this decisive effect in different situations, needs to be timely provided with the updates that are generated at the end of the line so that, from the mobilization of his resources until the conquest of an objective, he can have situational awareness of all his fractions and thus make the best decisions regarding the employment of his troops in order to fulfill the mission issued by the Highest Level.
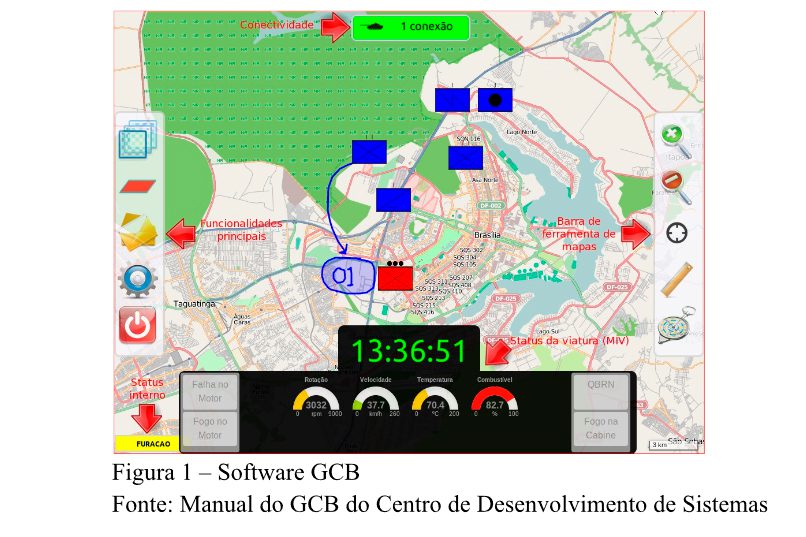
Therefore, we emphasize that more equipment is needed so that the C2 can be executed. Among these we can mention the Georeference Battlefield System (GCB), which, even though it has some limitations, provides a real update and cooperates to maintain situational awareness.
We can also mention the Remotely Piloted Aircraft Systems (SARP), a means that brings us the possibility of a more tactical perspective, providing a timely observation of the enemy’s scheme of maneuver and even of their actions, eliminating surprise in their activities and allowing the FT Cmt to have all the details for which of his Aç to select.

Development
One notices not only an advance in personnel performance in the current combat, but mainly in war material, such as the acquisition and manufacturing of modern armored vehicles for the armored troops. Currently, the Brazilian Army has vehicles that are good enough to be used in combat.
An Armored Task Force enables firepower, mobility and shock action to conduct continuous offensive and defensive operations (BRASIL, 2020, p. 1-5).
However, due to the technical limitations of our vehicles, and aligned with the Army’s Strategic Programs, the installation of a Battlefield Georeferencing System (GCB) in the vehicles is essential for a FT U Bld Cmt to have an operational awareness and an effective Command and Control on the battlefield, in order to avoid failures in the various missions, delays, fratricides, and to enforce the orders issued by the Higher Echelon.
It is worth remembering that the current VBTP used by the armored marines of the Task Force does not have any stabilized optical means for the VBTP commander. Thus, in a scouted combat, the embarked troops lose all situational awareness of the operation, and are unable to orient themselves and pass on information to the higher echelon correctly and in a short period of time.
Brazil has several works under development in this aspect, such as the Battle Field Manager (GCB), a subproject of the strategic project Armored Forces, a product developed by the Army Technological Center (CTEx), with support from the Army Electronic Warfare Communication Center (CCOMGEEx) and the System Development Center (CDS).
The GCB software is of national technology, as is the Military Tactical Computer (CTM-EB1), used in the VBTP Guarani. Both are compatible, allowing the installation of the GCB in the CTM-EB1, which is located in the commander’s station of the VBTP Guarani and aims to provide commanders of all ranks with relevant information such as: the provision of current positions of all vehicles; ammunition needs; fuel needs; enemy situation in real time, as well as the possibility of issuing fragmentary orders (BRASIL, 2016).
In a paper developed by Billodre and Souza Júnior (2019), about the subunit task force of combat cars in the locality attack, it was found that with the GCB embarked in a FT Esqd CC in the locality attack, it provided an increase in the speed of progression, the reduction of operation time, there was an improvement in the spatial orientation of the garrisons, a more efficient transmission of data between the armored vehicles and, consequently, the annulment of the fratricide rates.
In addition, it increased the situational awareness of car commanders and subunit commanders, since this system offers a range of information inside their own vehicle.
The installation of a GCB in the vehicles that make up a FT U Bld, would not result in a change in the QCP of the SU, only a specialization by the military in using the system in CTTEP.
However, the unit’s QCP, inserted in the communications platoon or maintenance platoon, must have military personnel specialized in the maintenance, installation, and configuration of the GCB.
In this way, aligned with the constant technological evolution, indicated by the Land Military Doctrine, the viability of installing the GCB software in the vehicles of an Armored Task Force would be a relevant gain for the armored troop.
The Remotely Piloted Aircraft Systems (SARP) are unmanned aerial vectors. The use of SARPs in ground operations is related to the ability of these systems to remain in flight for long periods of time, particularly over hostile areas, both from the perspective of the belligerents and the environmental conditions.
This capability allows commanders at various levels and echelons to obtain information, select and engage ground objectives and targets beyond direct, in-depth battlefield targeting (EB20-MC-10.214). This tool complements and enhances ground military capabilities, especially the units of the Infantry and Cavalry base weapons.
The use of SARP for the benefit of the Command and Control (C2) combat function is a new system for the exercise of activities inherent to it. It is certainly a technological innovation that brings great increment to the combat power of the military force that uses it, but it is basically just a new platform for the exercise, guaranteeing commanders the exercise of authority and the direction of actions (EB20-MF10-102).
It can be stated that obtaining situational awareness is a critical factor for success, as it gives the commander the initiative for actions. Access to real-time aerial imagery of the action zone is one of the most efficient ways to obtain situational awareness, and the SARP is a tool designed to provide this capability to the command.
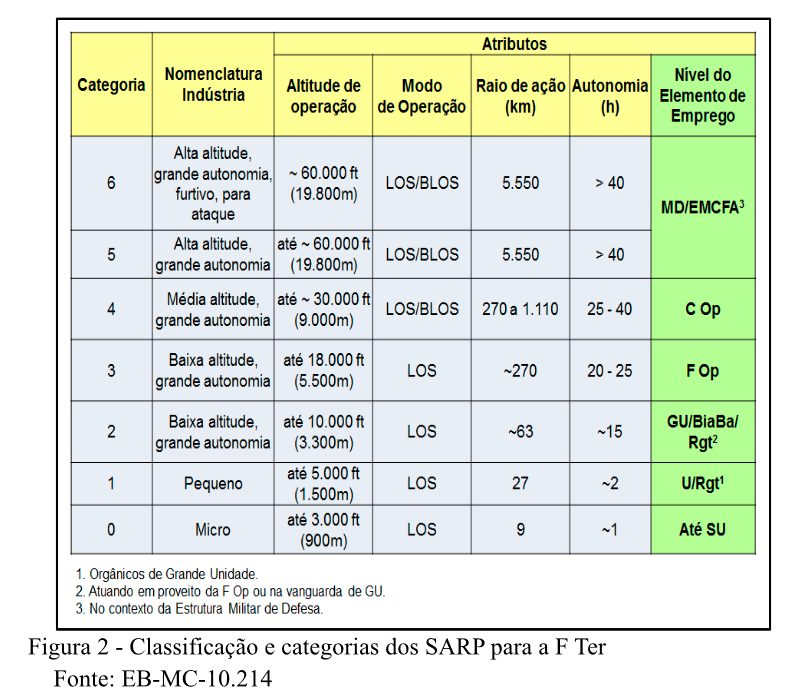
The SARPs are categorized from level 0 to level 6 (as shown in the following table), with category 1 being more suitable for Rgt level. The main feature of the cat 0, 1 and 2 SARPs is their vocation for conducting aerial observation. Equipped with appropriate optical sensors, these means can provide a panoramic view of the overflight area, even at night (thermal and residual light amplification sensors).
This provides the commander with real-time information about the terrain and the enemy. SARP cat 0 have autonomy of less than one hour and are viable for specific reconnaissance, mainly aiming at the safety of the troops that use it (Pel or SU). This can be done through the observation of counter slopes, perimeters of points where troops are vulnerable to ambushes and access routes, action zone just after the LP just before the attack or with sporadic flights beyond LAADA during an area defense, for example.
The SARP Cat 1 have autonomy between one and two hours and have similar use to cat 0, but are used at unit level and have extended range of action, and can also be used to monitor specific actions of fractions of the unit (reconnaissance for example), allowing the observer to guide the fraction commander on the immediate situation of threats and points of interest for recognition.
Conclusion
Finally, aligned with the constant technological evolution, indicated by the Land Military Doctrine, the viability of installing the GCB software in the vehicles of an Armored Task Force would be a relevant gain for the armored troop.
For the FT U Bld Cmt, the vehicles that should receive the software would be those of the subunit commander, that is, at least 1 GCB per FT SU, but, in order to have the awareness of 2 operational levels below, the vehicles of the platoon commanders could also be included in the software.
The ideal is that all the VBC of the CC platoon and the VBTP of the Marine platoon have GCB, so that if there is any accident with the vehicle of the platoon commander, the other elements can continue the combat in the same conditions. However, the current software does not allow the configuration of a hierarchical network, so the FT U Bld commander would have the information of all vehicles in the unit, which would pollute with excess information.
The acquisition of SARPs for the units contributes to a better decision making process at different levels, especially for the FTU Bld commander. As the manual EB20-MC-10.214 – Air Vectors of the Land Force shows, the unit can use SARPs of categories 0, 1 and even 2.
Therefore, in order to improve situational awareness, a Category 1 or 2 aircraft would be required to be used directly for the unit commander to get a better view of the battlefield, and Category 0 aircraft for the scout platoon to do reconnaissance and for subordinate FT SUs.
It should be noted that the aircraft operator in the FT SU would be a member of the Command Section. Due to specific characteristics, the CC platoon is unable to use the SARP and the Marine platoon, even if it has personnel, would not be able to use it because the preparation and maneuverability of the aircraft requires attention and time, which would hinder the fraction that is characterized by fire, movement and shock action.
With this, the acquisition of a GCB and a SARP is highly positive for the situational awareness of a FT U Bld Cmt, improving the understanding of the battlefield, and with that, the decision making process.

REFERENCES:
BRAZIL. EB20-RO-04.054 – Remotely piloted aircraft system category 2. Brasília , DF, 2019.
BRASIL. EB20-MC-10.214 – Vetores aéreos da Força Terrestre. Brasília , DF, 2014.
BRASIL. EB20-MC-10.205 – Command and Control. Brasília, DF, 2015.
BRASIL. EB20-MF-10.102 – Doutrina Militar Terrestre. Brasília, DF, 2019.
ENDSLEY. Mica R – Toward a theory of situational awareness in dynamic systems. 1995. USA, Texas Tech University, Texas – Available at: https://journals.sagepub.com/doi/abs/10.1518/001872095779049543 .
- BRAZIL. MD31-M-03 – Doctrine for the Military Command and Control System , 3rd Edition, 2015.
- Campaign Manual EB70-MC-10.355 – Armored Task Forces, 4th Edition, 2020.
- BRAZIL. SYSTEMS DEVELOPMENT CENTER (CDS). Manual of the Battlefield Manager (GCB). Brasília, DF, 2016. 92 p.).
- BRAZIL. MD31-M-03 – Doctrine for the Military Command and Control System, 3rd Edition, 2015.
- BRAZIL. EB70-MC-10.355 – Armored Task Forces, 4th Edition, 2020.
- Billodre , M. G., & Souza Junior, N. (2019). THE COMBAT CAR SUBUNIT TASK FORCE IN LOCALITY ATTACK: SATELLITE GEOREFERENCING SYSTEM IN OPERATIONAL VEHICLES. Gyro Do Horizonte, 8(3), 75-90.
*** Translated by the DEFCONPress FYI Team ***